
宇树人形机器人在行业内处于领先水平,具备高度的智能化和灵活性。转手绢操作对于机器人技术来说是一项具有挑战性的任务。需要精确控制机器人的关节和手臂,以实现高速且准确的转动。还需要通过复杂的算法和传感器技术来确保机器人对环境的感知和适应。宇树人形机器人正不断克服技术难题,提升转手绢操作的精度和稳定性,推动人形机器人在更多领域的应用。
本文目录导读:
宇树人形机器人在行业内的发展水平
随着科技的飞速发展,人形机器人在众多领域的应用逐渐普及,而宇树人形机器人作为其中的佼佼者,在行业内已经取得了显著的发展成果,宇树人形机器人凭借其高度智能化、灵活性和强大的功能性能,成为了业界的翘楚。
宇树人形机器人在技术研发方面取得了重要突破,其设计融合了先进的机械电子、计算机视觉、人工智能等技术,使得机器人在模拟人类行为、感知环境等方面表现出色,宇树机器人还具备自主导航、智能交互等高级功能,为用户提供了更加便捷、高效的服务体验。
宇树人形机器人在实际应用领域也取得了显著成果,无论是在工业制造、医疗服务、救援救灾还是服务娱乐等领域,宇树人形机器人都能发挥重要作用,在工业制造领域,宇树人形机器人可以完成高精度、高强度的作业任务,提高生产效率;在医疗服务领域,宇树人形机器人可以协助医生进行手术操作、护理患者等,提高医疗服务质量;在救援救灾领域,宇树人形机器人可以深入灾区进行搜救、监测等任务,为救援工作提供有力支持。

宇树人形机器人在行业内已经具备了较高的技术水平和发展水平,为推进人形机器人的普及和应用做出了重要贡献。
转手绢操作的技术挑战
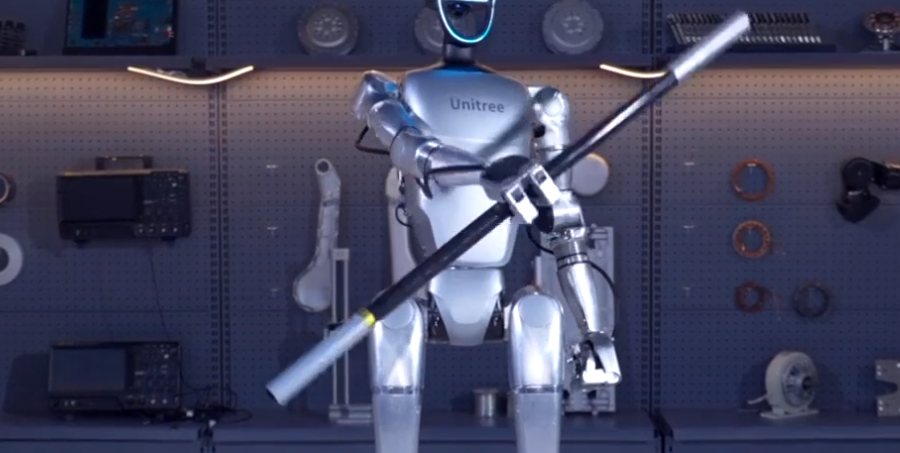
转手绢作为中国传统民间艺术的一种表演形式,具有极高的观赏性和艺术性,对于人形机器人来说,实现转手绢这一操作具有一定的技术挑战。
转手绢需要机器人具备高度灵活的手臂和手腕,转手绢需要精确控制手臂和手腕的运动轨迹、速度和力度,这就要求机器人必须具备高度灵活性和精确性。
转手绢操作还需要机器人具备稳定的平衡能力,由于转手绢过程中机器人的重心会发生变化,因此需要机器人具备稳定的平衡系统,以保证操作的准确性和稳定性。
实现转手绢操作还需要机器人具备先进的控制系统和算法,机器人需要通过先进的控制系统和算法来实现对手臂、手腕的精确控制,以及对转手绢过程的精确调节。
对于宇树人形机器人来说,由于其已经具备了高度智能化、灵活性等先进技术特点,因此在实现转手绢操作方面具有一定的优势,要实现转手绢操作,还需要进一步研究和开发更加精确的控制系统和算法,以及更加灵活的手臂和手腕结构。
宇树人形机器人在行业内已经具备了较高的技术水平和发展水平,为推进人形机器人的普及和应用做出了重要贡献,虽然实现转手绢操作对于人形机器人来说具有一定的技术挑战,但是宇树人形机器人已经具备了实现这一操作的基础条件,随着技术的不断进步和创新,我们有理由相信宇树人形机器人将在实现转手绢操作方面取得重要突破,为我们带来更多精彩的表演和艺术体验。
为了实现转手绢操作,宇树人形机器人需要继续加强技术研发和创新,提高机器人的灵活性、精确性和平衡能力,还需要深入研究先进的控制系统和算法,以实现对手臂、手腕的精确控制和对转手绢过程的精确调节,还需要加强与实际应用的结合,通过在实际表演场景中的应用实践来不断优化和完善机器人的性能和功能。

宇树人形机器人在行业内的发展前景广阔,实现转手绢操作虽然具有一定的技术挑战,但是随着技术的不断进步和创新,我们有信心看到宇树人形机器人在未来为我们带来更多精彩的表演和艺术体验。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号